






 English
English
Comprendre > Concepts fondamentaux > Mécanique céleste II
LA MECANIQUE CELESTE
ET LA GRAVITATION UNIVERSELLE
- Le principe fondamental de la dynamique
- La gravitation universelle
- Le problème à 2 corps
- Les mouvements dans le système solaire
- Les points de Lagrange
- Remarques générales sur les théories planétaires
- Les théories analytiques
- Les intégrations numériques
- L'argument temps dans les théories planétaires
- Application : l'excentricité de l'orbite terrestre
Le principe fondamental de la dynamique
Le principe fondamental de la dynamique est un outil développé dans le cadre de la mécanique classique, qui permet de faire le lien entre les forces appliquées à un corps et l'évolution cinématique de ce corps. Appliqué à un solide de masse m dont le mouvement est défini dans un référentiel dit galiléen, le principe s'énonce : F = mg = m dv / dt
F représente l'ensemble des forces appliquées à l'objet, et g son accélération.
Appliquée à un point matériel (un solide de dimension négligeable devant les distances mises en jeu) ou à un ensemble de points matériels, cette loi peut se réécrire de diverses manières, toutes équivalentes :
- le théorème du mouvement du centre de masse (ou barycentre) :
" le barycentre d'un système matériel se meut comme si
toute la masse du système y était transportée, les
forces extérieures au système agissant toutes sur ce barycentre"
-le théorème du moment cinétique appliqué
à un point matériel :
"la dérivée par rapport au temps du moment cinétique
en un point d'un système matériel est, à chaque instant,
égale au moment résultant des forces extérieures par
rapport à ce même point"
-le théorème de l'énergie cinétique (autrefois
appelé théorème des forces vives) :
"la variation de l'énergie cinétique d'un système
matériel pendant un intervalle de temps donné est égal
à la somme des travaux des forces intérieures et extérieures
appliquées à ce système pendant cet intervalle de temps".
On doit ces principes à Huygens (1629-1695) et Galilée (1564-1642), mais ils ont été affinés par la suite par Clairaut (1713-1765), Descartes (1596-1650), Euler (1707-1783), D'Alembert (1717-1783), ...
Notons que du théorème du moment cinétique découle directement la deuxième loi de Kepler (lois des aires), résultant du seul fait que l'interaction gravitationnelle est une force "centrale".
La gravitation universelle
Le caractère universel de la gravitation a été mis en évidence par Newton (1642-1727) dans son oeuvre "Principes mathématiques de philosophie naturelle". Newton a été le premier à comprendre que la pomme qui tombe d'un arbre et la Lune qui tourne autour de la Terre obéissent à une même loi et que leurs mouvements sont en fait de même nature.
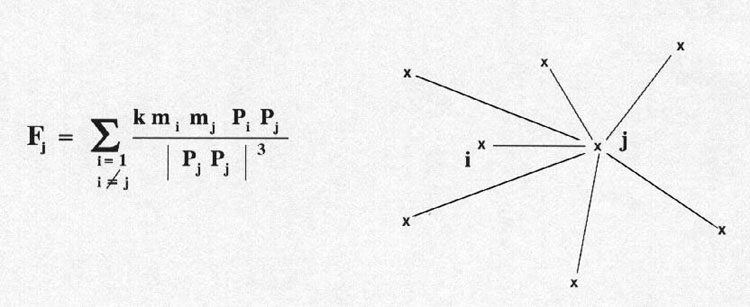
La loi de la gravitation universelle, l'une des 4 interactions fondamentales, s'énonce ainsi :
deux points matériels de masse m et m' exercent l'un sur l'autre une force attractive directement proportionnelle aux masses et inversement proportionnelle au carré de la distance r les séparant. Le module F de cette force vaut :
F = G m m' / r2
où G est la
constante de la gravitation.
Cette loi suppose la transmission instantanée des forces dans l'espace. La mécanique céleste est alors l'application de la mécanique newtonienne et des principes fondamentaux de la mécanique aux corps du système solaire. C'est Laplace qui a mis en place les fondements de la mécanique céleste.
La gravitation universelle explique (presque) tout :
-le mouvement des planètes et de leurs satellites
-la précession et la nutation
-les marées.
Elle n'explique pas l'excès d'avance
du périhélie de Mercure.
Pour expliquer ce dernier point, il est nécessaire de faire
appel à la théorie de la relativité générale
pour laquelle :
-il n'y a pas de temps absolu
-la notion de référentiel galiléen n'est plus
pertinente
-la transmission des forces se fait à la vitesse de la lumière,
et non instantanément.
En première approximation, la mécanique newtonienne à laquelle on applique quelques additifs, explique parfaitement les mouvements dans le système solaire. Mais avant d'aborder un cas aussi complexe, on s'intéresse d'abord au problème restreint à 2 corps.
Le problème à deux corps
Le problème à 2 corps s'intéresse à 2 solides, assimilés à leur centre de masse, seuls à interagir. Ce problème est soluble analytiquement, relativement simplement, en travaillant dans le référentiel du centre de masse du système ; le reste de l'Univers étant oublié, le centre de masse est isolé et fournit un bon référentiel galiléen pour l'étude du mouvement.
- Tout d'abord, on peut montrer que le mouvement des 2 corps l'un autour
de l'autre est plan. Ceci résulte du fait que le moment cinétique
du système est constant, car l'interaction est centrale, toujours
dirigée vers le barycentre du système.
- Ensuite, l'interaction gravitationnelle se traduisant par un "champ
de force", il en découle que l'énergie du système
est également constante.
- Enfin, le module de la force évoluant comme l'inverse du carré
de la distance entre les 2 corps, un autre invariant apparaît. Cet
invariant se traduit par le vecteur excentricité, et la trajectoire
relative d'un corps par rapport à l'autre s'apparente à un
cercle, une ellipse, une parabole ou une hyperbole. Cette trajectoire,
dans le plan du mouvement, est définie par son demi-grand axe, de
mesure a, et l'excentricité e.
Les mouvements dans le système solaire
Dans le système solaire on retrouve un problème de Ncorps s'attirant mutuellement.
Mais si on regarde d'un peu plus près, on se rend compte qu'on a en présence un très gros corps, le Soleil, mille fois plus massif que la plus grosse des planètes, Jupiter, entouré de petits corps tournant autour de lui. Chaque couple Soleil-planète est un problème à deux .On peut considérer en première approximation la masse m de la planète comme négligeable devant celle du Soleil (notée M) et la force subie par la planète est alors :
F = -G Mm /r2
Le coefficient GM, produit de la constante gravitationnelle et de la
masse du soleil, est alors le même pour toutes les planètes,
ce que Kepler (1571-1630) avait remarqué sans le démontrer.
Les points de Lagrange
Pour obtenir une modélisation des mouvements dans le système solaire, on va partir du problème simplifié dans lequel les trajectoires des planètes sont des ellipses mais dont les éléments de ces ellipses vont varier au cours du temps. Cette ellipse de base est appelée ellipse osculatrice. Pour chaque planète on va considérer un problème à deux corps perturbé par les autres planètes. C'est Lagrange (1736-1813) au XVIIIème siècle qui a posé les équations du problème.
Lagrange a aussi noté que dans un système à deux corps, il existait des positions d'équilibre où des corps supplémentaires pouvaient rester captifs. Ces positions sont appelées aujourd'hui les points de Lagrange du système à deux corps. La figure ci-dessous montrent l'emplacement des 5 points L1, L2, L3, L4, L5 (les points L1, L2 et L3 sont aussi appelés "points d'Euler" qui les avait aussi détectés). Seuls les points L4 et L5 sont des points d'équilibre stables. Des astéroïdes sont piégés sur ces points de l'orbite de Jupiter et de celle de Mars. Les points L1 et L2 de la Terre permettent d'installer des télescopes d'observation (Soho, un satellite d'observation du Soleil en L1, Gaia, un satellite d'observation astrométrique et JWST pour observer le ciel profond en L2). Les points L1 et L2 sont à 1,5 millions de kilomètres de la Terre. Attention, un tel système devient instable si la masse du corps P fait plus de 3% de la masse du corps S.
Remarques générales sur les théories planétaires
Le mouvement des planètes autour du Soleil est un cas particulier du problème des N corps pour lequel on n'a pas de solution exacte pour N supérieur à 2. Tous les corps s'attirent les uns les autres conformément à la loi de la gravitation mais on considère que les planètes ont une masse faible devant celle du corps central, le Soleil. On recherche des solutions approchées du problème fondées sur la théorie des perturbations, où les coordonnées sont des fonctions du temps t, des masses des corps en présence et des constantes d'intégration. On obtient ces solutions en construisant des théories analytiques ou en effectuant des intégrations numériques.
Les théories analytiques.
Les coordonnées sont obtenues sous forme de combinaisons de fonctions algébriques et trigonométriques analytiques du temps t et des paramètres du problème, masses et constantes d'intégration. Calculer une position avec de telles théories est long mais relativement simple puisqu'il suffit de substituer le paramètre "temps" dans les séries. Jusqu'à l'apparition des ordinateurs, il était nécessaire de construire des tables intermédiaires à partir desquelles on pouvait fabriquer des éphémérides.
Les intégrations numériques.
Les intégrations numériques donnent les valeurs numériques des coordonnées et des vitesses pour des valeurs t0, t0+h, t0+2h, etc., t0 étant le temps initial et h étant le pas d'intégration. Les méthodes d'intégration numérique sont bien adaptées aux calculs par ordinateur. Cependant, pour calculer une position, il est indispensable de construire des tables intermédiaires à l'aide de l'intégration numérique. Ces tables seront utilisées pour la fabrication des éphémérides.
L'argument temps dans les théories planétaires
Il convient de dire maintenant quelques mots sur l'argument "temps" des éphémérides. En effet, pour connaître une position à un instant donné, quel instant chercher dans les éphémérides ? Jusqu'en 1834, on a utilisé le temps solaire vrai de Paris. Ensuite, du fait de l'existence d'horloges plus fiables, on a utilisé le temps moyen de Paris. En 1916, suite à une convention internationale, on a utilisé le temps moyen de Greenwich. Ces temps étaient jusque là liés à la rotation de la Terre considérée comme suffisamment uniforme. La mise en évidence d'irrégularités dans cette rotation amena les astronomes à introduire une échelle de temps uniforme pour le calcul des éphémérides, échelle de temps basée sur la rotation de la Terre autour du Soleil. On utilisa le Temps des éphémérides défini à partir de la théorie du Soleil de Newcomb, ou encore, comme dans la Connaissance des temps, le Temps uniforme de Le Verrier tiré de sa théorie du Soleil et donc très proche du précédent. A partir de 1984 on introduisit le Temps terrestre, temps uniforme construit à partir des horloges atomiques beaucoup plus stables que les mouvements célestes pour construire une échelle de temps.
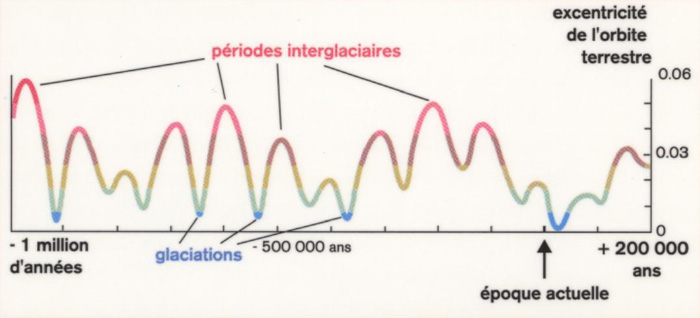
L'excentricité de l'orbite terrestre
La mécanique céleste permet également d'obtenir, à une précision plus faible que celle des éphémérides valables sur quelques siècles, l'évolution des orbites planétaires sur de très longues durées de l'ordre de plusieurs millions d'années. On constate ainsi que l'excentricité de l'orbite terrestre subit de larges variations formées de nombreux termes périodiques dont les plus importants ont des périodes voisines de 100 000 ans, et pour l'un d'eux, une période de 400 000 ans. Les travaux de l'Institut de mécanique céleste, depuis les années 1970, ont permis de confirmer définitivement l'hypothèse astronomique des variations climatiques de la Terre au cours de l'ère quaternaire. Les paléoclimatologues montrent en effet la corrélation entre les variations des éléments de l'orbite terrestre et les grandes glaciations du quaternaire. L'orbite circulaire de la Terre correspond à une glaciation et une orbite elliptique à une période chaude. La grande précision de la mécanique céleste offre ainsi une horloge à la paléoclimatologie en lui donnant les dates des glaciations et des périodes interglaciaires.
Crédit : IMCCE